Note: This document refers to the MapCreator version 1.x.
Click here for manual of MapCreator 2.0
By Juha Angeria, Customer Support Engineer
When starting to create bigger and more complex maps it helps have good floor plan and to understand some features of magnetic field characteristics and what kind of mapping path coverage is required.
Floorplan
As you discovered in Getting Started With The Blue Dot, you will need a good floor plan with which you can accurately place yourself in the venue and match recorded sensor data to your accurate position. Getting an accurate floor plan will pay off in mapping effort and accuracy. Overly abstract floor plan can cost lots of time while trying to identify where the path is to be recorded and failing to estimate positions correctly will decrease positioning accuracy. Even more so if map has errors which person doing the mapping fails to detect.
If venue is bigger than 200m*200m and it has clear sections, we recommend that you separate each section to its own map. Floor plan resolution should be at least 3 pixels per meter to be able to set markers accurately in MapCreator 1.5. Having more than 5 pixels per meter probably doesn’t give more benefit, but can cause overhead in connection time.
Mapping coverage
Mapping coverage is one crucial factor to accuracy. In supermarkets with clear structure and narrow aisles (2 meters), a single path for each aisle is enough. In venues with wider areas to cover, more data needs to be recorded. To some extent it can be said that the more data you have, the better is the accuracy. Size of the venue defines how much effort needs to be put to mapping.
Some tips for mapping:
Some tips for mapping:
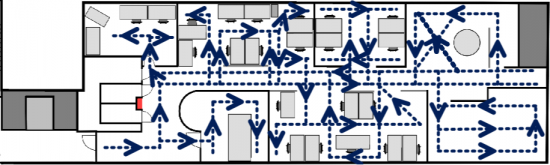
1. Check how people move around in the venue. This will be the most used data and has the biggest impact to the user experience. Often grid format is easy to implement, but as people don’t walk like robots, it is better to record the same data the end users will be collecting.
2. Record areas most likely having distinctive magnetic anomalies like near escalators and elevators or big pillars.
3. Mapping coverage is crucial factor to accurate positioning:
a) Magnetic field can change greatly even in short distances. So having good coverage of recorded paths in each area enables best experience.
b) IndoorAtlas technology doesn’t use the information for walls and obstacles in the map. Instead it defines walkable area from recorded maps and if there is a gap more than 1.5 meters between paths, it is considered as an obstacle.
Tip: Simple rule for coverage; For each meter of width add one parallel path to reach high level accuracy. If map has gap bigger than 1.5 meters the algorithm won’t be able to calculate accurate positioning through that space.
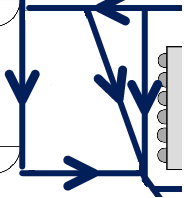
4. When covering corridors with multiple paths, record parallel lines to opposite direction. This saves you time walking around and produces a more robust recording.
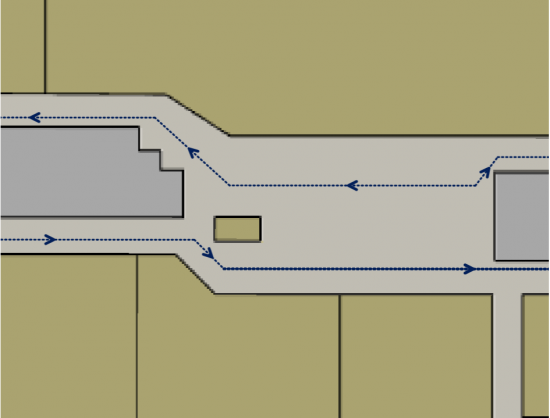
5. Avoid hugging walls and other obstructions. The sensor signal can change significantly when in very close proximity to large objects and people will naturally tend to keep a half meter (2-feet) distance or more to walls, so do the same when mapping.
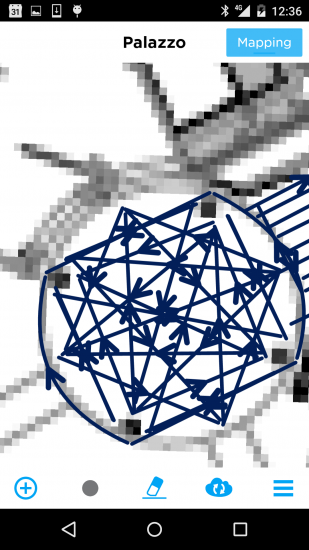
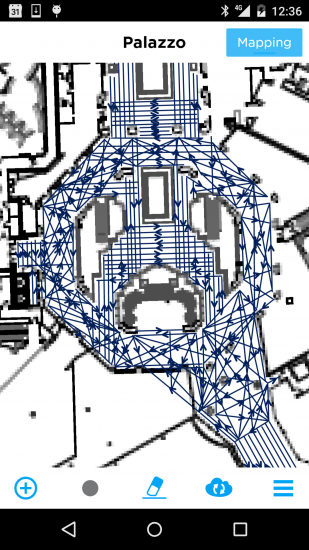
Typical cases of an unmapped area:
| 1. A big hole in an open area | 2. Not enough paths in a wide aisle |
 |
 |
In this case, add more mapping paths into these areas to improve the coverage.
Open Areas
Covering straight corridors is easy, but when corridors start to bend or they open into an oval shaped lobby, things get more challenging. This is where floor plan details are starting to pay off. As said earlier, you need to draw paths accurately, which is easy in corridors as you can draw paths along walls. In asymmetric environment you need the details/reference points in your map to be able to tell where your start and end points are in MapCreator 1.5 and in the physical environment.
A reference point can be anything you can identify from the real environment and from the floor plan, but some points are more reliable than others.
 Pillars, fire hydrants, corners of supporting walls and elevators are usually reliable reference points. Light weight walls and doors are less reliable as those are easy to move, so they tend to move when stores change, and render the floorplan inaccurate with time. Don’t just blindly trust the map – if something seems off, make some measurements to see if the floorplan has changed. Reading map and using reference points might be a little confusing at first, but it is a skill that comes with practice. Learning this skill will save you lots of time in longer run.
Pillars, fire hydrants, corners of supporting walls and elevators are usually reliable reference points. Light weight walls and doors are less reliable as those are easy to move, so they tend to move when stores change, and render the floorplan inaccurate with time. Don’t just blindly trust the map – if something seems off, make some measurements to see if the floorplan has changed. Reading map and using reference points might be a little confusing at first, but it is a skill that comes with practice. Learning this skill will save you lots of time in longer run.
Covering an open area
In open spaces it can be difficult to accurately cover the space with precisely marked paths, due to lack of easy landmarks and other people walking in unclear directions. With less structures producing magnetic anomalies, high-accuracy positioning can also be affected. On the other hand high accuracy is often not as critical. If you are ok with 3-5 meters of accuracy in open areas, you can save some effort in mapping.
Strategy for mapping an open area needs to be checked case by case. There are few ways to approach this:
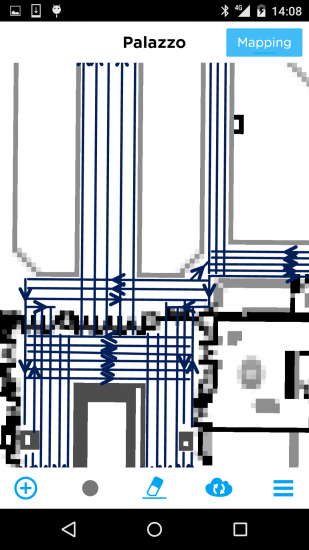
Corridor/SquaresYou can use parallel paths in corridor following the floor tiles, 0.9-1.5m between the paths depending on how accurate you’d like to achieve. This also applies for large square area. Gird works well too especially for crossing area if the map is accurate in scale, though it is not necessary.
|
|
Circles/CurvesYou could draw a curved path with the tool though it is not recommended since it’s difficult to control the accuracy while drawing curves: select the path, and you can see an arrow in the middle of the line which indicates the direction of the path, tap the arrow and move it so you are making a curve. |
|
Irregular ShapesYou need a combination of all the techniques, find reliable reference points and cover the whole area thoroughly. Floor plan quality has high impact how much reference points you have available. Magnetic data should be collected all over walkable area, but sometimes people flow can be used to prioritise effort between different areas.
|
Covering fast
Time spend during mapping can be divided into 3 different topics:
1. Walking – We don’t recommend to try to save time by walking fast or even running as keeping phone aligned might be challenging and shaking will make the recorded data less accurate. It is best to just walk at your natural speed. Your best way to save time walking is to minimise the time you walk without recording data. Continue mapping from where previous path ended.
2. Using the MapCreator 1.5 tool – Double tap the Start/End point button in the app, so the start point will be placed automatically at the end point of previous path. Using MapCreator 1.5 faster is something that comes with practise. It takes you maybe a half a day to a day of mapping to get the routine and familiar with the tool.
3. Thinking – Don’t overthink the way you plan your mapping. To some extent it can be said that the more data you have, the better the accuracy. So don’t think too much what is the “right” data to record, but look for the “easy” data. Record path after path from easily identifiable reference point to another. Continue this until you have walked every easy path and you gets lots of coverage fast. Just after running out of easy paths, start thinking which part of the map would need more coverage and how can you record that data accurately.
Thinking outside the box
The number of “easy” paths available is often directly related to amount of details in the floor plan. So again the quality of the floor plan has great impact. If you don’t have reference points in the floor plan, you need to start estimating the position of path start and end points, which has higher risk of recording less accurate data. Some tips for minimising the estimation error:
1. Counting pillars, hand rail poles, floor tiles, windows and such can give you ratios or even accurate distances for example if you know the size of one floor tile.
2. Remember that visually estimating a middle point is easier than estimating what is 1/3 of something.
3. Look for less visible reference points which you can find in floor plan and real environment
a) Floor tiles over open area which can be aligned to straight wall or handrail. You can draw this path using wall as guideline and walk straight over the open area using floor tiles. Remember the start and end points as those are often valuable additions
b) Some blueprints might have air-condition pipes or sealing structures in the drawing, so look the ceiling above you.
c) Look also suitable reference points that might be far away but still visible in real world. Sometimes those are hard to detect when MapCreator 1.5 is zoomed in.
The point here is that try to find a reasoning for why you place the markers as you do. Rough estimation can easily lead into errors. Sometimes there is no options, but start estimating as a final resort.
Team mapping
When facing big venues like an airport, a question will raise…”Can mapping be done with multiple phones at the same time?” and the answer is yes. You can have a team working on a venue, just remember to use the same account and floor plan (i.e. the same FloorplanID in IndoorAtlas). In this way all the data will be collected into one map.
Few tips for team effort:
1. Give dedicated areas for each mapper. This is to avoid mappers disturbing each other
2. Separate areas clearly. One floor per mapper is the easiest separation. If you need to work in a same floor plan, make sure everyone knows the borders of their section to avoid duplicated work. One good way is to record paths to mark the edge of sections and sync this to all mappers. This is also good way to interconnect data from all mappers.
3. Take break every 2 hours to rest your legs.The mapping process happens offline, so mappers can’t see each other’s work in real time. Sync data to cloud and phones at this time. Also remember to charge phones during these breaks.
4. When mapping of a section has been finished, record test data, build map and review analytics when those are available. Map Accuracy Analysis tells you how to read analytics results.
Note that mapping can continue while the Generating Map-icon (cloud with three green dots) is shown on the screen.
Related articles: Getting Started With The Blue Dot, Map Accuracy Analysis, MapCreator 1.5 UI Guide, Troubleshooting